First scalable solution for continuous asset inspection with a regular smartphone
Boost your road
maintenance efficiency
with AI-powered surveys
maintenance efficiency
with AI-powered surveys







Roadly is a turnkey solution for road condition surveys that runs on a smartphone mounted on a car windshield and detects distresses on a road automatically using artificial intelligence.
Save time and money
with smartphone
road inspections
with smartphone
road inspections
Easily gather and track pavement data with AI technology
Streamline inspection process
and reduce manual assessments
and reduce manual assessments

Enhance efficiency with accurate
and up-to-date road condition information
and up-to-date road condition information
Improve road safety and address
issues promptly
issues promptly


City of Nashville DOT:
pavement inspection
pavement inspection
Minnesota DOT:
traffic signs inventory
traffic signs inventory
Roadly case studies
NYS DOT: inventory
of reference markers
of reference markers
NYS DOT:
guardrails inventory
guardrails inventory

5 miles of the PCI Inspection are included in our free trial
Receive a comprehensive evaluation of a sample road segment, complete with detailed analysis of its condition.
Seamlessly integrate the collected data with your existing GIS and work order systems.
Make informed decisions about maintenance and repair strategies.
Streamline both long-term capital planning and daily road inspections.
Enhance annual budget planning and communicate budgetary needs to the city council using data from Roadly.
Identify roads in need of maintenance or repair and effectively prioritize tasks.
Receive an objective assessment of road conditions using the Pavement Condition Index in under one month.
Efficient way to monitor
your road networks
your road networks




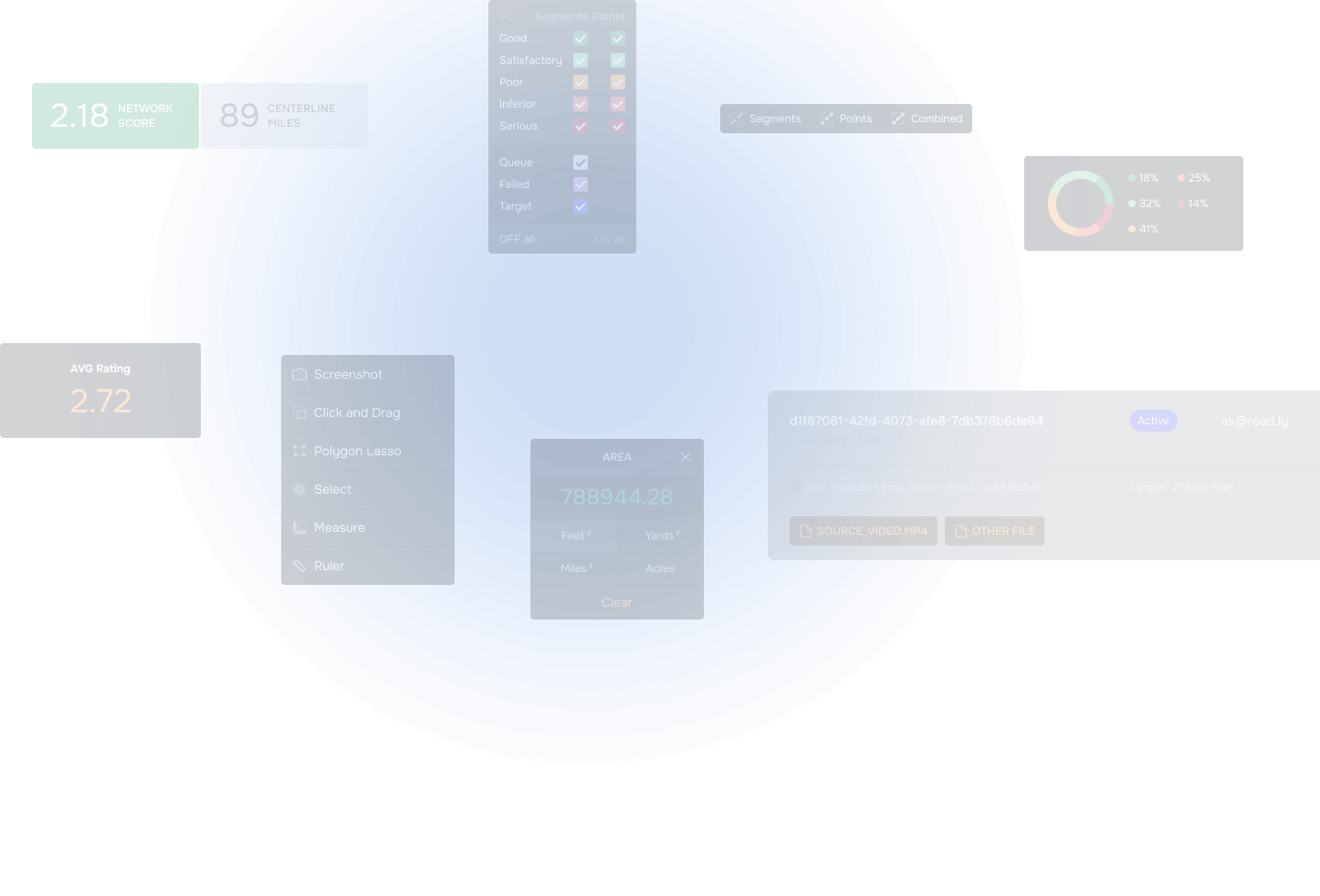
Efficiently dispatch your maintenance crews directly using Roadly's web-based map to address the detected pavement distresses.
Strategically plan repair routes by visualizing the pavement distresses and their severity.
Our system utilizes machine learning to objectively rate road conditions, offering a solution that is more cost-effective and expedient than traditional inspection methods. Roadly delivers near real-time analytics, measuring, identifying, and tracking road issues, complete with GPS coordinates of each detected pavement distress.
Make data-driven decisions with AI-powered road inspection


How it works
Processed data is visualized on a web-based map and can also be exported as needed:
- Daily
- Weekly
- Monthly
- Quarterly
3

- Daily
- Weekly
- Monthly
- Quarterly
Recorded videos and collected metadata are uploaded to the cloud

1

Roadly then utilizes SLAM engine to detect pavement distresses and accurately localize them in 3D
1
Processed data is visualized on a web-based map and can also be exported as needed:
2

Recorded videos and collected metadata are uploaded to the cloud
Roadly then utilizes SLAM engine to detect pavement distresses and accurately localize them in 3D
2
3


We value your time, so we offer government users the opportunity to try Roadly risk-free, without any commitments.
FREE trial
Operating Roadly is as easy
as launching the app and driving
as launching the app and driving
Easy to operate
Installing Roadly typically takes less than 10 minutes.
Quick to Install
Roadly’s setup process
Roadly can be installed in minutes without any permanent modifications to your vehicle.

Enhance the efficiency
of the road asset inspection operations in your municipality. Improve road safety and infrastructure.
of the road asset inspection operations in your municipality. Improve road safety and infrastructure.
Asset Inspection
Enhance the efficiency
of the road asset inspection operations in your municipality. Improve road safety and infrastructure.
of the road asset inspection operations in your municipality. Improve road safety and infrastructure.
PCI Inspection
The modern automotive industry requires 3D maps with up-to-date information about road features. We offer cutting-edge products to achieve these goals.
Automotive
HD & ADAS mapping platform
Industries
Publications